Shane's pneumatic RAM chip published in PLOS ONE
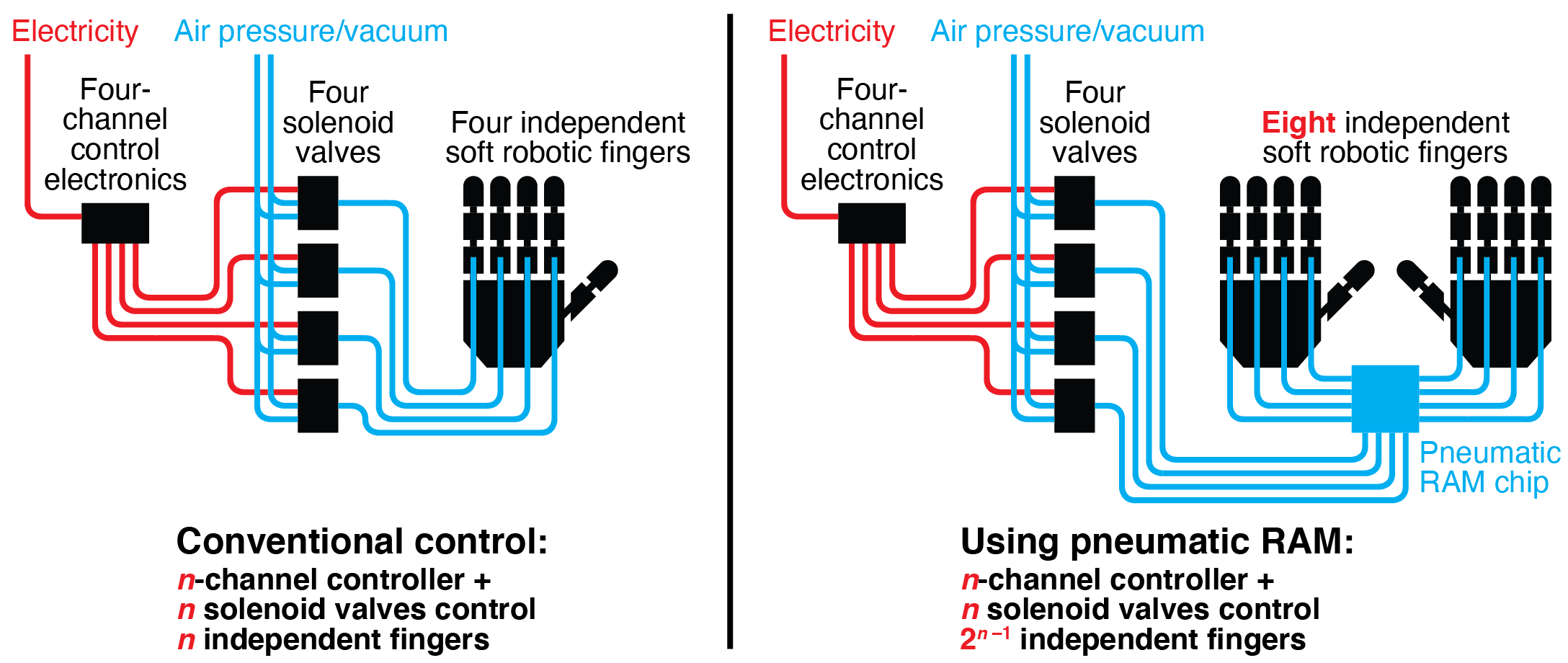
Shane Hoang’s paper “A pneumatic random-access memory for controlling soft robots” was published in PLOS ONE. Shane developed a “pneumatic RAM chip,” a pneumatic logic circuit capable of controlling pneumatic soft robots. By dramatically reducing the amount of electronic hardware required to control soft robots, the pneumatic RAM can accelerate the spread of soft robotic technologies to a wide range of important application areas.
Thanks to our coauthors Konstantinos Karydis and Philip Brisk for their help with this work!